- AI코딩과정
- 로봇코딩과정
- 창의력교구
- 방문교육(홈스쿨)
- 강사양성과정
- 진로체험교육
- 커뮤니티
- 쇼핑몰
- * 정규교육 과정
- * 심화교육 과정
- * 경진대회 과정



로봇코딩과정
 home > 로봇코딩과정
home > 로봇코딩과정

PREMIUM 중급과정 
휴머노이드 중급과정은
로보티즈 프리미엄 중급키트를 활용하여 로봇이 동물이나 사람의 실질적인 움직임을 모방하여 구현할 수 있으며, 모션프로그램, C언어, 3D프린터 등 다양한 프로그램을 배우고, 재미있는 문제해결을 통해 논리력과 창의력을 기를 수 있으며, 대회참가를 통해 실력을 검증하고 스펙을 쌓아, 나만의 특별한 포트폴리오를 만들어 나갈 수 있습니다.
교육대상 |
기본과정이수자 또는 중급과정 수업가능자 |
실습도구 |
로보티즈 프리미엄 중급키트 |
수업시간 |
주1회 1회90분 |


- 상세설명
- 교육시간
중급 응용 로봇
각 로봇의 조립서는 인터넷이 연결되어 있어야 다운로드 받으실 수 있습니다.
| Examples | Description |
|---|---|
1.집게탐사차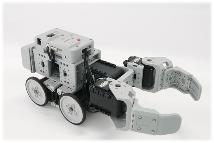 | Download 조립서 Download 데모용 태스크 코드 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(7), 적외선 센서(1), 거리 센서(1)다이나믹셀 설정 값 AX-12+ ID[1]~ ID[4] : 바퀴모드AX-12+ ID[5]~ ID[7] : 관절모드 RoboPlus 문법 함수, 호출, 복귀, 로드, 계산, 무조건 반복, 만약, 아니면, 조건 대기, 반복 끝내기알고리즘 적외선 센서와 거리 센서 값에 따라 장애물 인식 및 처리동작 방법- 제어기의 U 버튼을 누르면 차단바가 열립니다. - 주행 경로 상에 여러 크기의 장애물을 설치해 놓고 집게 탐사차를 작동시킵니다. 장애물이 너무 크면 피해서 주행하는 것을 확인합니다. 장애물이 적당한 크기면 들어서 옆으로 치워 놓고 주행하는 것을 확인합니다. |
2.포크레인 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(8), 적외선 센서(1), 거리 센서(1)RoboPlus 문법 함수, 호출, 로드, 계산, 무조건 반복, 만약, 아니면, 조건 대기알고리즘 적외선 센서와 거리 센서 값에 따라 다이나믹셀 위치 제어동작 방법- 주행 경로 상에 장애물을 설치해 놓고 포크레인을 작동시킵니다. - 전방에 물체가 감지되면 굴삭 작업을 하는 것을 확인합니다. 물체를 든 상태에서 센서에 장애물이 감지되면, 감지된 방향으로 회전한 후 물체를 내려놓는 것을 확인합니다. |
3.로봇꽃 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(6)RoboPlus 문법 함수, 호출, 로드, 무조건 반복, 만약, 아니면, 조건 대기알고리즘 소리 감지 횟수에 따라 모션 제어동작 방법- 전원을 켜면 꽃잎을 펴고 춤추듯이 천천히 움직입니다. - 박수 소리가 한번나면 꽃입을 천천히 오므립니다. 박수 소리가 여러번나면 꽃입을 빨리 오므립니다. |
4.아기사슴 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(7), 적외선 센서(1)다이나믹셀 설정 값 AX-12+ ID[1]~ ID[7] : 관절모드RoboPlus 문법 함수, 호출, 로드, 무조건 반복, 만약, 아니면 만약, 아니면, 조건 대기알고리즘 적외선 센서 값에 따라 물체 인식동작 방법- 아무 변화가 없을 때, 아기 사슴은 앉아서 두리번거립니다. - 얼굴에 물체를 대면, 그 물체를 계속 쫓아옵니다. |
5.거북이 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(8), 적외선 센서(2), 거리 센서(1)다이나믹셀 설정 값AX-12+ ID[1]~ ID[8] : 관절모드RoboPlus 문법 함수, 호출, 로드, 무조건 반복, 만약, 아니면 만약, 아니면, 조건 대기알고리즘 적외선 센서와 거리 센서 값에 따라 장애물 회피동작 방법- 보행 경로 상에 장애물을 설치해 놓고 거북이를 작동시킵니다. - 거북이가 기어가다가 전방에 장애물을 만나면 피해가는 것을 확인합니다. |
6.거웍(GerWalk) | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(7), 적외선 센서(2), 거리 센서(1)다이나믹셀 설정 값AX-12+ ID[1]~ ID[7] : 관절모드RoboPlus 문법 함수, 호출, 로드, 무조건 반복, 만약, 아니면 만약, 아니면, 조건 반복알고리즘 적외선 센서와 거리 센서 값에 따라 새의 보행 패턴 제어동작 방법- 보행 경로 상에 장애물을 설치해 놓고 거웍을 작동시킵니다. - 보행 중 전방 및 좌우에 장애물이 감지되면 피해갑니다. |
7. 배틀드로이드 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(8), 적외선 센서(1)다이나믹셀 설정 값AX-12+ ID[1]~ ID[8] : 관절모드RoboPlus 문법 변수, 함수, 호출, 로드, 계산, 무조건 반복, 만약, 아니면 만약, 아니면, 조건 대기알고리즘 적외선 센서 값에 따라 다이나믹셀 제어동작 방법- 보행 경로 상에 장애물을 설치해 놓고 배틀 드로이드를 작동시킵니다. - 보행 중에 장애물을 만나면 양 팔로 공격합니다. 배틀 드로이드가 넘어졌을 때 전, 후면을 구분하여 스스로 일어납니다. |
8.4족로봇 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(8), 적외선 센서(1), 거리 센서(1)다이나믹셀 설정 값AX-12+ ID[1]~ ID[8] : 관절모드RoboPlus 문법 함수, 호출, 로드, 무조건 반복, 만약, 조건 대기알고리즘 적외선 센서와 거리 센서 값에 따라 4족 보행 제어동작 방법- 보행 경로 상에 장애물을 설치해 놓고 4족로봇을 작동시킵니다. - 보행 중 전방에 장애물이 감지되면 피해갑니다. |
9.보행머신 | Download 조립서 Download 데모용 태스크 코드 Download 데모용 모션 파일 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(8), 적외선 센서(1), 거리 센서(1)다이나믹셀 설정 값AX-12+ ID[11]~ ID[18] : 관절모드RoboPlus 문법 함수, 호출, 로드, 무조건 반복, 만약, 아니면 만약, 아니면, 조건 대기, 조건 반복알고리즘 적외선 센서와 거리 센서 값에 따라 2족 보행 제어동작 방법- 보행 경로 상에 장애물을 설치해 놓고 보행머신을 작동시킵니다. - 보행 중 전방 및 좌우에 장애물이 감지되면 피해갑니다. |
10.로봇팔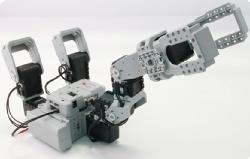 | Download 조립서 Download 데모용 태스크 코드 Download 동영상 사용된 장치 CM-510/CM-530(1), AX-12+(8)다이나믹셀 설정 값AX-12+ ID[1]~ ID[8] : 관절모드RoboPlus 문법 함수, 호출, 로드, 계산, 무조건 반복, 만약, 아니면, 조건 반복알고리즘 다이나믹셀간 위치값 통신동작 방법- 제어 모터를 움직이면 반응모터가 따라 움직이는지 확인 합니다. |
QUICK MENU








|
설립일 : 2009 년 12월 4일 대표이사 : 권오필 개인정보책임자 : 권오필 이메일 : mirobot@korea.com 사업자등 록번호 :144-81-30759  통신판매업신고 : 제2014-경기성남-1553호 통신판매업신고 : 제2014-경기성남-1553호주소 : (13597) 경기도 성남시 분당구 내정로 173번길 49(수내동33-2)궁전프라자209호 대표전화 : 031-719-4523 (전국공통) |