- AI코딩과정
- 로봇코딩과정
- 창의력교구
- 방문교육(홈스쿨)
- 강사양성과정
- 진로체험교육
- 커뮤니티
- 쇼핑몰
- * 정규교육 과정
- * 심화교육 과정
- * 경진대회 과정



로봇코딩과정
 home > 로봇코딩과정
home > 로봇코딩과정
아두이노(ARDUINO) 심화과정 
코딩과정을 ARM Cortes M3 기반의 로봇용 임베디드 제어기를 이용한 아두이노(ARDUINO) 프로그램을 기초부터 고급과정까지 교육함
아두이노 |
아누이노 |


- 아두이노
![]()
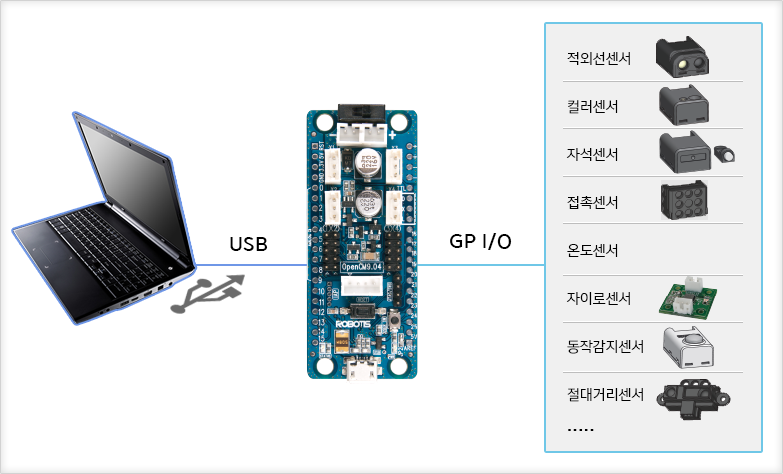
회로도와 소스코드가 공개된
ARM Cortex M3 기반의 로봇용 임베디드 제어기
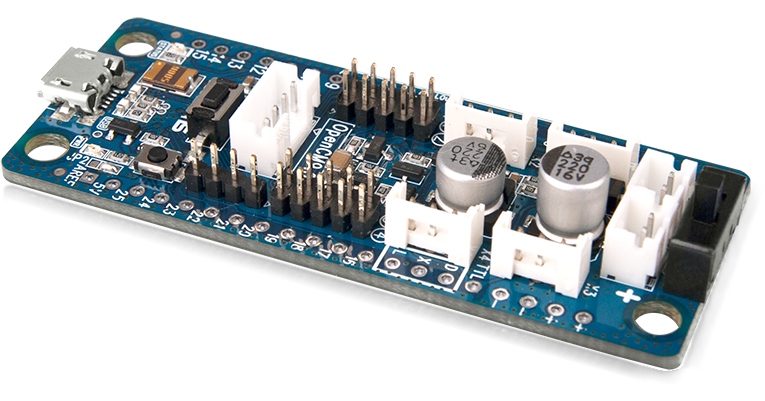
저가격, 고성능
- 1만원대의 초저가 달성
- 고성능의 32bit CPU 장착
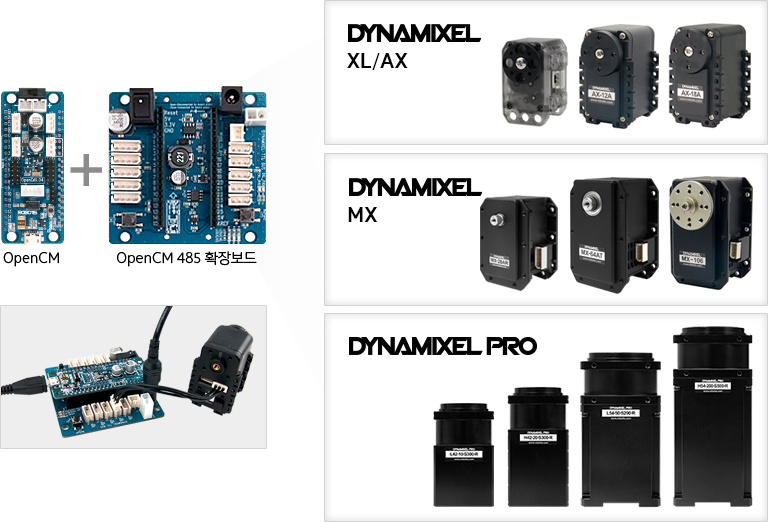
다이나믹셀 전라인업 제어
- [XL-320]부터 [H54-200-S500-R]까지 모든 다이나믹셀 제어 가능
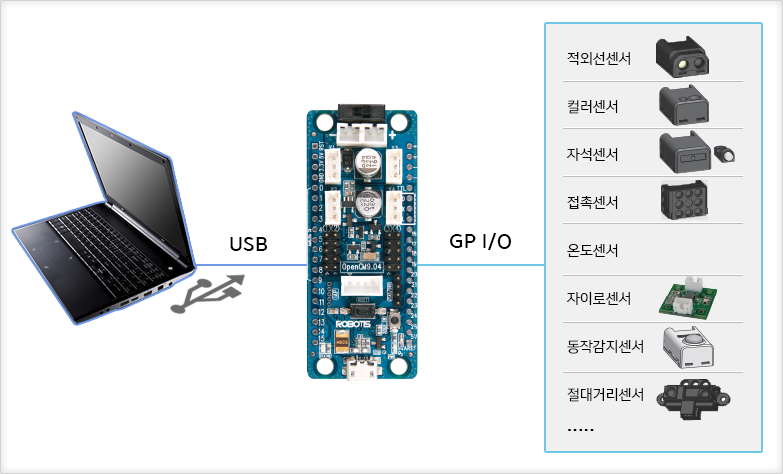
간편하고 다양한 인터페이스
별도의 외부 다운로더없이 스마트폰용 USB Cable로 다운로드
GP I/O를 이용해 다양한 입출력 장치 연결 가능
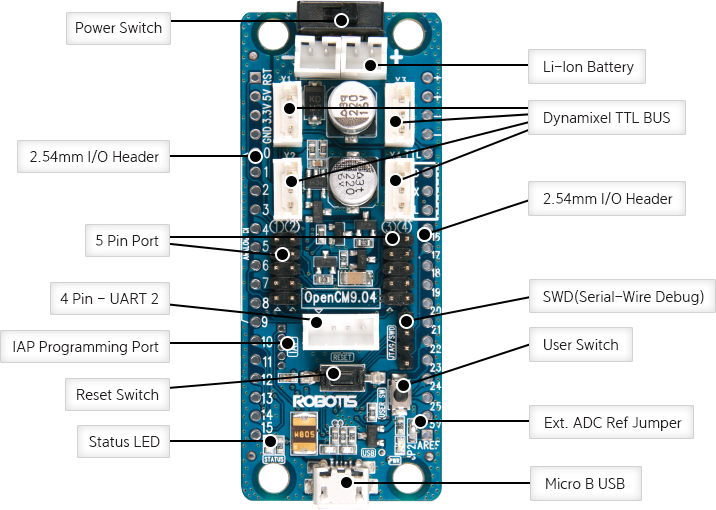
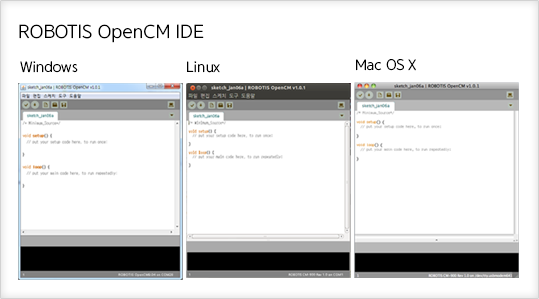
다양한 개발환경
- 로보티즈의 통합 프로그래밍 소프트웨어인 [RoboPlus] 지원
- 전용 개발 프로그램인 [ROBOTIS OpenCM IDE] 사용 가능
- JTAG / SWD 단자를 통해 다른 상용개발프로그램 이용 가능

관련 자료
- 회로도 및 거버 다운로드
http://support.robotis.com/ko/product/controller/opencm9.04.htm - 소프트웨어 다운로드
(ROBOTIS OpenCM에서 사용된 오픈 소스의 라이선스는 원저작자의 라이선스를 따르고 (주)로보티즈에 의해 새로 만들어지거나 변형된 코드의 저작권은 (주)로보티즈에 있으며 GNU GPL 혹은 LGPL을 따릅니다. 자세한 사항은 OpenCM9.04의 e-Manual Appendix의 라이선스 부분을 참고하세요.)
http://support.robotis.com/ko/software/robotis_opencm_main.htm - 국내외 유저 작품
Metabot: open-source legged robotics platform (Gregoire Passault, France)
4 DoF Bipedal robot with XL-320, CM9.04 and HaViMo (Hamid Moballegh from HaViSys UG, Germany)
QUICK MENU








|
설립일 : 2009 년 12월 4일 대표이사 : 권오필 개인정보책임자 : 권오필 이메일 : mirobot@korea.com 사업자등 록번호 :144-81-30759  통신판매업신고 : 제2014-경기성남-1553호 통신판매업신고 : 제2014-경기성남-1553호주소 : (13597) 경기도 성남시 분당구 내정로 173번길 49(수내동33-2)궁전프라자209호 대표전화 : 031-719-4523 (전국공통) |